
SARNAV is a project I did for my M.S.E.E. thesis. The goal of the project was to create a replacement navigation system using Synthetic Aperture Radar for when GPS is unavailable or unreliable. To design the system, I leveraged the information in Digital Elevation Models to provide absolute localization for any aircraft equipped with SARNAV.
I presented this work at the SPIE conference.
https://www.spiedigitallibrary.org/conference-proceedings-of-spie/10647/106470H/Leveraging-3D-models-for-SAR-based-navigation-in-GPS-denied/10.1117/12.2304420.short?SSO=1
THESIS ABSTRACT:
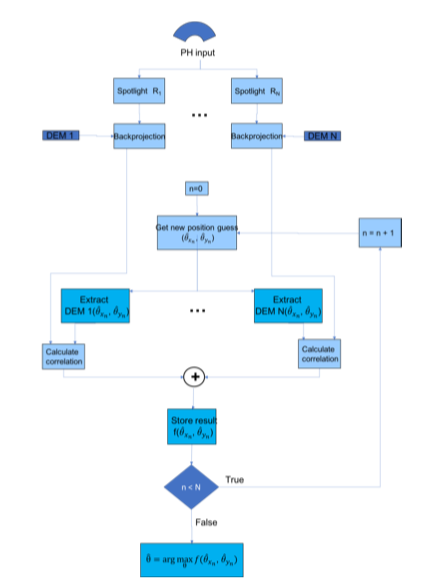
This thesis considers the use of synthetic aperture radar (SAR) to provide absolute plat- form position information in scenarios where GPS signals may be degraded, jammed, or spoofed. Two algorithms are presented, and both leverage known 3D ground structure in an area of interest, e.g. provided by LIDAR data, to provide georeferenced position information to airborne SAR platforms. The first approach is based on the wide-aperture layover properties of elevated reflectors, while the second approach is based on correlating backprojected imagery with digital elevation imagery. Both of these approaches constitute the system we have designated: SARNAV. Building on 3D backprojection, localization solutions result from non-convex optimization problems based on image sharpness or correlation measures. Results using measured GOTCHA data demonstrate localization errors of only a few meters with initial uncertainty regions as large as 16 km2. Finally, the system is incorporated into a Kalman filter tracker, where periodic SARNAV updates could be used to correct drift from an inertial navigation system. With measured data, the system was able to track the true position along the route within a few meters of error.